Consider the following linear system:
\[\overrightarrow{x}'=A(t)\overrightarrow{x}, \;\;\;\;(55)\]
\(A(t)\) is a real-valued continuous function of \(t\).
Theorem.
If \(\overrightarrow{x}=\overrightarrow{u}(t)+i\overrightarrow{v}(t)\) is a solution of (55) for real-valued functions
\(\overrightarrow{u}(t)\) and \(\overrightarrow{v}(t)\), then so are
\(\overrightarrow{u}(t)\) and \(\overrightarrow{v}(t)\).
\[\begin{align*}
(\overrightarrow{u}+i\overrightarrow{v})'&= A(\overrightarrow{u}+i\overrightarrow{v})\\
\overrightarrow{u}'+i\overrightarrow{v}'&= A\overrightarrow{u}+iA\overrightarrow{v}.
\end{align*}\]
Comparing real and imaginary parts of both sides, we get
\(\overrightarrow{u}'=A\overrightarrow{u}\) and \(\overrightarrow{v}'=A\overrightarrow{v}\).
Theorem.
If \(A\) has complex eigenvalue \(\lambda=r+i\theta\) with corresponding eigenvector \(\overrightarrow{v}\),
then two linearly independent solutions of (55) are
\[\overrightarrow{x_1}=e^{rt}[\cos(\theta t)Re \overrightarrow{v}-\sin(\theta t)Im \overrightarrow{v}]\]
and
\[\overrightarrow{x_2}=e^{rt}[\cos(\theta t)Im \overrightarrow{v}+\sin(\theta t)Re \overrightarrow{v}].\]
We have verified before that \(\overrightarrow{x}=e^{(r+i\theta)t}\overrightarrow{v}\) is a solution.
\[\begin{align*}
\overrightarrow{x}&=e^{rt}[\cos(\theta t)+i\sin(\theta t)][Re \overrightarrow{v}+iIm\overrightarrow{v}]\\
&=e^{rt}[\cos(\theta t)Re \overrightarrow{v}-\sin(\theta t)Im \overrightarrow{v}]+ie^{rt}[\cos(\theta t)Im \overrightarrow{v}+\sin(\theta t)Re \overrightarrow{v}].
\end{align*}\]
The rest follows from the preceding theorem and Wronskian.
Solution. (a) \(\lambda=2\pm 3i\) and \(\overrightarrow{v}=
\left[\begin{array}{l}-1+3i\\5\end{array} \right]\). A solution is
\[\begin{align*}
\overrightarrow{x}&=e^{2t}[\cos(3t)+i\sin(3t)]
\left(\left[\begin{array}{r}-1\\5\end{array} \right]
+i\left[\begin{array}{r}3\\0\end{array} \right]\right)\\
&=e^{2t}\left(\cos(3t)\left[\begin{array}{r}-1\\5\end{array} \right]-\sin(3t)\left[\begin{array}{r}3\\0\end{array} \right]
\right)+
ie^{2t}\left(\cos(3t)\left[\begin{array}{r}3\\0\end{array} \right]+\sin(3t)\left[\begin{array}{r}-1\\5\end{array} \right]\right)
\end{align*}\]
So the general solution is
\[\begin{align*}
\overrightarrow{x}&=c_1 \overrightarrow{x_1} +c_2\overrightarrow{x_2}\\
&=c_1e^{2t}\left(\cos(3t)\left[\begin{array}{r}-1\\5\end{array} \right]-\sin(3t)\left[\begin{array}{r}3\\0\end{array} \right]
\right)+
c_2e^{2t}\left(\cos(3t)\left[\begin{array}{r}3\\0\end{array} \right]+\sin(3t)\left[\begin{array}{r}-1\\5\end{array} \right]\right)\\
&=c_1e^{2t}\left[\begin{array}{l}-\cos(3t)-3\sin(3t)\\5\cos(3t)\end{array} \right]+
c_2e^{2t}\left[\begin{array}{r}3\cos(3t)-
\sin(3t)\\5\sin(3t)\end{array} \right].\\
\end{align*}\]
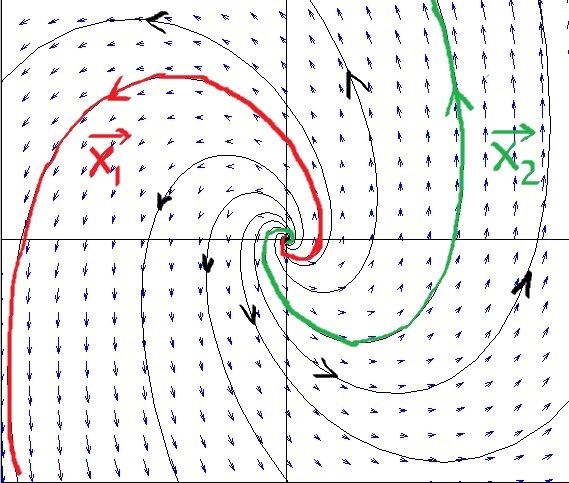
(b) To draw the spiral for \(\overrightarrow{x_1}\), get a point on it by plugging \(t=0\) and then find the tangent vector
\(\overrightarrow{x_1}'(0)\) at the point \(\overrightarrow{x_1}(0)\). Do the same for \(\overrightarrow{x_2}\).
The origin is an unstable spiral point. Note that the origin would have been
an asymptotically stable spiral point if eigenvalues had negative real part.
Note that there are 3 types of trajectories for the eigenvalue \(\lambda=r\pm i \theta\) in a system of 2 linear ODEs:
\(r < 0\), the origin is an asymptotically stable spiral point
\(r > 0\), the origin is an unstable spiral point
\(r=0\), the origin is a stable center (trajectories are circle or ellipse)
Solution.
(a) \(\lambda=\pm i\) and \(\overrightarrow{v}=
\left[\begin{array}{l}-1+i\\1\end{array} \right]\). A solution is
\[\begin{align*}
\overrightarrow{x}&=[\cos(t)+i\sin(t)]
\left(\left[\begin{array}{r}-1\\1\end{array} \right]
+i\left[\begin{array}{r}1\\0\end{array} \right]\right)\\
\end{align*}\]
So the general solution is
\[\begin{align*}
\overrightarrow{x}&=c_1 \overrightarrow{x_1} +c_2\overrightarrow{x_2}\\
&=c_1\left(\cos(t)\left[\begin{array}{r}-1\\1\end{array} \right]-\sin(t)\left[\begin{array}{r}1\\0\end{array} \right]
\right)+
c_2\left(\cos(t)\left[\begin{array}{r}1\\0\end{array} \right]+\sin(t)\left[\begin{array}{r}-1\\1\end{array} \right]\right)\\
&=c_1 \left[\begin{array}{l}-\cos t-\sin t\\\cos t\end{array} \right]+
c_2\left[\begin{array}{r}\cos t-\sin t\\\sin t\end{array} \right]
\end{align*}\]
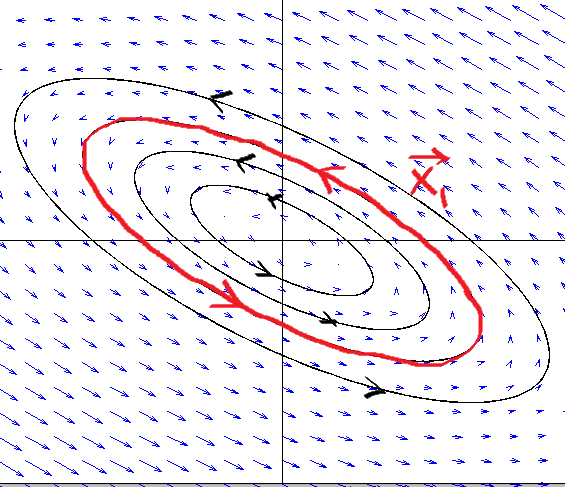
(b) Let's draw the trajectory for
\(\overrightarrow{x}=\overrightarrow{x_1}=\left[\begin{array}{l}-\cos t-\sin t\\\cos t\end{array} \right]\).
It gives the trajectory
\[x_1=-\cos t-\sin t,\; x_2=\cos t.\]
Solving for \(\cos t\) and \(\sin t\), we get \(\sin t=-(x_1+x_2),\; \cos t=x_2\). Using \(\sin^2 t+\cos^2 t=1\),
we get the trajectory which is the ellipse
\[(x_1+x_2)^2+x_2^2=1\]
whose one axis is \(x_1+x_2=0\). To determine the direction of a trajectory, plot tangent vector at a point,
say \([1, \; 0]^T\):
\[\overrightarrow{x}'=\left[\begin{array}{rr}
-1&-2\\1&1\end{array} \right] \left[\begin{array}{r}1\\0\end{array} \right]=\left[\begin{array}{r}-1\\1\end{array} \right].\]
So trajectories move counterclockwise. Note that if \(A\) is not given, then plug \(t=\pi/2\) to get a point
\(\overrightarrow{x_1}(\pi/2)\) and the tangent vector \(\overrightarrow{x_1}'(\pi/2)\) at the point
\(\overrightarrow{x_1}(\pi/2)\). The origin is a stable center, but not asymptotically stable
as trajectories do not move toward the origin as \(t\) increases.