Equilibrium Solutions and Phase Portraits |
Consider the following system of \(n\) linear ODEs:
\[\overrightarrow{x}'=A\overrightarrow{x}, \;\;\;\;(53)\]
where \(\overrightarrow{x}=[x_1,\; x_2,\cdots,\; x_n]^T\). \(\overrightarrow{x}\) is called
an equilibrium solution of (53) if \(A\overrightarrow{x}=\overrightarrow{0}\).
Obviously \(\overrightarrow{x}=\overrightarrow{0}\) is always an equilibrium solution of (53). Note that if \(A\) is
invertible (i.e., \(\det A\neq 0\) or, all eigenvalues of \(A\) are nonzero), then
\(A\overrightarrow{x}=\overrightarrow{0}\implies \overrightarrow{x}=A^{-1}\overrightarrow{0}=\overrightarrow{0}\)
and \(\overrightarrow{x}=\overrightarrow{0}\) is the only equilibrium solution of (53).
Direction field/ tangent field: A solution curve or a trajectory of (53) can be visualized
by plotting direction field of tangent vectors to solutions of (53). \(\overrightarrow{x}'=A\overrightarrow{x}\)
is the tangent vector of a solution curve at \(\overrightarrow{x}\in \mathbb R^n\).
We mostly focus on the case \(n=2\) and plot trajectories on the \(x_1x_2\)-plane which is called the
phase plane. A sketch of trajectories on the phase plane is called a phase portrait.
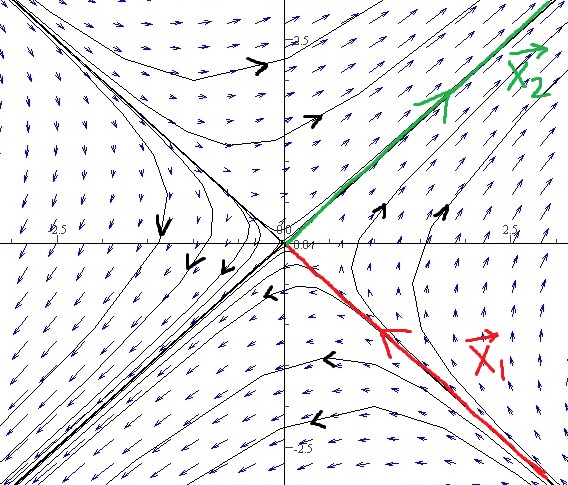
Example. \(\overrightarrow{x}'=\left[\begin{array}{rr} 1&2\\2&1\end{array} \right] \overrightarrow{x}\).
Solution. (a) At \(\overrightarrow{x}=\left[\begin{array}{r}0\\0\end{array} \right],\;
\overrightarrow{x}'=\left[\begin{array}{rr}
1&2\\2&1\end{array} \right] \left[\begin{array}{r}0\\0\end{array} \right]= \left[\begin{array}{r}0\\0\end{array} \right].\)
At \(\overrightarrow{x}=\left[\begin{array}{r}\pm 1\\0\end{array} \right],\;
\overrightarrow{x}'=\left[\begin{array}{rr}
1&2\\2&1\end{array} \right] \left[\begin{array}{r}\pm 1\\0\end{array} \right]= \pm \left[\begin{array}{r}1\\2\end{array} \right].\)
At \(\overrightarrow{x}=\left[\begin{array}{r}0\\ \pm 1\end{array} \right],\;
\overrightarrow{x}'=\left[\begin{array}{rr}
1&2\\2&1\end{array} \right] \left[\begin{array}{r}0\\ \pm 1\end{array} \right]= \pm \left[\begin{array}{r}2\\1\end{array} \right].\)
At \(\overrightarrow{x}=\pm \left[\begin{array}{r}1\\1\end{array} \right],\;
\overrightarrow{x}'=\pm \left[\begin{array}{rr}
1&2\\2&1\end{array} \right] \left[\begin{array}{r}1\\ 1\end{array} \right]= \pm \left[\begin{array}{r}3\\3\end{array} \right].\)
At \(\overrightarrow{x}=\pm \left[\begin{array}{r}1\\-1\end{array} \right],\;
\overrightarrow{x}'=\pm \left[\begin{array}{rr}
1&2\\2&1\end{array} \right] \left[\begin{array}{r}1\\ -1\end{array} \right]= \pm \left[\begin{array}{r}-1\\1\end{array} \right].\)
Now draw the tangent vector \(A\overrightarrow{x}\) at each \(\overrightarrow{x}\).
(b) The eigenvalues of the coefficient matrix are \(-1\) and \(3\) with corresponding eigenvectors
\(\left[\begin{array}{r}1\\-1\end{array} \right]\) and \(\left[\begin{array}{r}1\\1\end{array} \right]\)
respectively (show all the steps). So the general solution is
\[\overrightarrow{x}(t)=
c_1e^{-t}\left[\begin{array}{r}1\\-1\end{array} \right]
+c_2e^{3t}\left[\begin{array}{r}1\\1\end{array} \right].\]
When \(c_2=0\), \(\overrightarrow{x}=c_1\overrightarrow{x_1}=c_1e^{-t}\left[\begin{array}{r}1\\-1\end{array} \right]\).
This gives the trajectory \(x_1=c_1e^{-t},\; x_2=-c_1e^{-t}\), i.e., the line \(x_2=-x_1\) (the line through the origin
parallel to \(\overrightarrow{v_1}=\left[\begin{array}{r}1\\-1\end{array} \right]\)). This trajectory is in the quadrant 4
when \(c_1 > 0\) and in the quadrant 2 when \(c_1 < 0\).
Note that \(\overrightarrow{x}=c_1\overrightarrow{x_1}=c_1e^{-t}\left[\begin{array}{r}1\\-1\end{array} \right]\) is far from
the origin for large negative \(t\) and \(\overrightarrow{x}=c_1\overrightarrow{x_1}=c_1e^{-t}\left[\begin{array}{r}1\\-1\end{array} \right]\to \left[\begin{array}{r}0\\0\end{array} \right]\)
as \(t\to \infty\).
When \(c_1=0\), \(\overrightarrow{x}=c_2\overrightarrow{x_2}=c_2e^{3t}\left[\begin{array}{r}1\\1\end{array} \right]\).
This gives the trajectory \(x_1=c_2e^{3t},\; x_2=c_2e^{3t}\), i.e., the line \(x_2=x_1\) (the line through the origin parallel
to \(\overrightarrow{v_2}=\left[\begin{array}{r}1\\1\end{array} \right]\)). This trajectory is in the quadrant 1
when \(c_2 > 0\) and in the quadrant 3 when \(c_2 < 0\). Note that \(\overrightarrow{x}=c_2\overrightarrow{x_2}=c_2e^{3t}\left[\begin{array}{r}1\\1\end{array} \right]\)
is far from the origin for large positive \(t\) and \(\overrightarrow{x}=c_2\overrightarrow{x_2}=c_2e^{3t}\left[\begin{array}{r}1\\1\end{array} \right]\to \left[\begin{array}{r}0\\0\end{array} \right]\)
as \(t\to -\infty\).
Note:
Example.
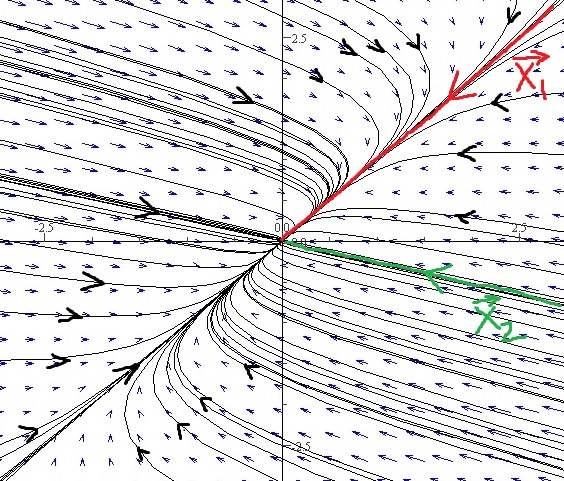
\(\overrightarrow{x}'=\left[\begin{array}{rr}
-5&4\\1&-2\end{array} \right] \overrightarrow{x}\).
Solution. The general solution is
\[\overrightarrow{x}(t)=
c_1e^{-t}\left[\begin{array}{r}1\\1\end{array} \right]
+c_2e^{-6t}\left[\begin{array}{r}4\\-1\end{array} \right].\]
\(c_2\overrightarrow{x_2}\) will dominate \(c_1\overrightarrow{x_1}\) for large negative \(t\) (i.e., when far from the origin).
\(c_1\overrightarrow{x_1}\) will dominate \(c_2\overrightarrow{x_2}\) for large positive \(t\) (i.e., when near the origin).
The origin is an asymptotically stable node.
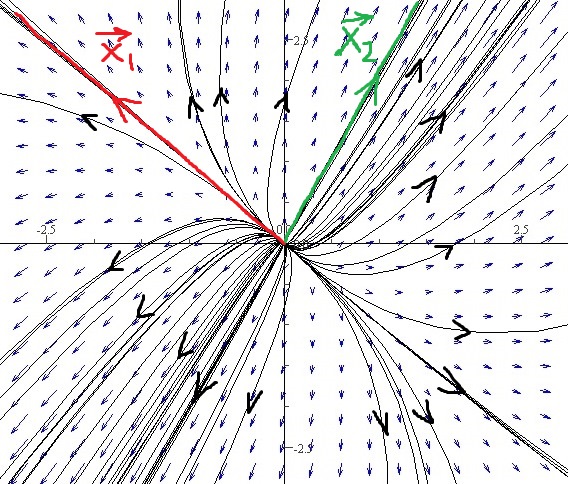
Example.
\(\overrightarrow{x}'=\left[\begin{array}{rr}
3&1\\2&4\end{array} \right] \overrightarrow{x}\).
Solution. The general solution is
\[\overrightarrow{x}(t)=
c_1e^{2t}\left[\begin{array}{r}-1\\1\end{array} \right]
+c_2e^{5t}\left[\begin{array}{r}1\\2\end{array} \right].\]
The origin is an unstable node.
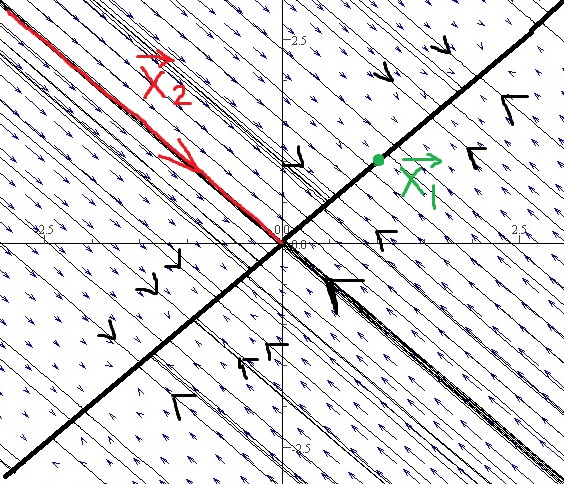
Example.
\(\overrightarrow{x}'=\left[\begin{array}{rr}
-1&1\\1&-1\end{array} \right] \overrightarrow{x}\).
Solution. The general solution is
\[\overrightarrow{x}(t)=
c_1\left[\begin{array}{r}1\\1\end{array} \right]
+c_2e^{-2t}\left[\begin{array}{r}-1\\1\end{array} \right].\]
Each point on the line \(x_2=x_1\) is an equilibrium. The origin is a degenerate node.
Note. The origin is asymptotically stable when both eigenvalues are negative (trajectories move toward the origin as \(t\) increases) and unstable when at least one eigenvalue is positive (trajectories move away from the origin as \(t\) increases).
Last edited